
LSTM长短期记忆网络
前言
前面说到RNN虽然能捕捉时序数据,但是在一些比较长的序列上面会出现梯度问题,而LSTM(长短期记忆网络)通过引入门控机制有效地解决了传统RNN中的梯度消失和梯度爆炸问题。
LSTM单元包含输入门、遗忘门和输出门,这些门控结构允许模型有选择性地保留或丢弃信息,从而控制信息流动。
- 遗忘门帮助模型决定哪些信息应该被遗忘
- 输入门决定哪些新信息应该被存储
- 输出门决定哪些信息应该被输出到下一个时间步
这种设计使得LSTM能够在长时间序列中保持梯度的稳定性,避免梯度在反向传播过程中的指数级衰减或增长,从而允许模型学习并记忆长期依赖关系。
一、模型结构
1.1 非常精辟的理解
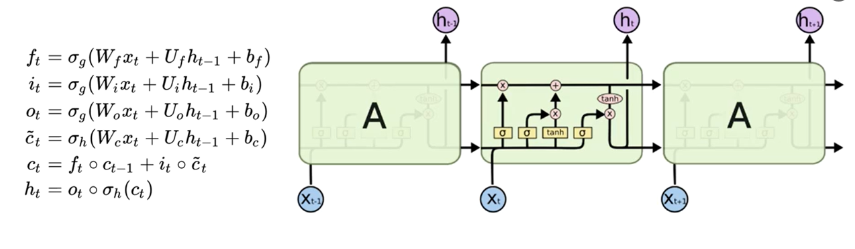
LSTM单元通过当前步的输入,前一步的隐藏状态和细胞状态,得到当前步的输出和下一步的隐藏状态
在遗忘门得到了一个历史细胞状态保留的比例①
在输入门得到了一个当前时间步的新信息②以及该新信息能被写入细胞状态的比例③
①与历史细胞状态相乘,保留历史细胞状态的一部分,②与③相乘,将新信息的一部分写入细胞状态,相加得到新的细胞状态④
在输出门结合前一步的隐藏状态得到了当前步的输出⑤,又以④得到当前步的隐藏状态⑥(当前步的输出并不独立于之前,而是既受到前一步的隐藏状态影响,也影响当前步的隐藏状态)
1.2 遗忘门
公式:

遗忘门通过接受当前时间步的输入$xt$以及前一时间步的隐藏状态$h{t-1}$,与遗忘门权重矩阵($Wf$,用于学习$\left[h{t-1}, x_t\right]$中需要遗忘哪些信息)相乘后经过sigmoid函数,最终得到细胞状态中每个元素应该被保留的比例
1.3 输入门
公式:
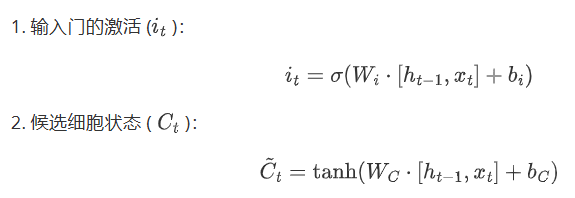
它结合了输入数据和先前的细胞状态,利用sigmoid函数来确定更新的量,并通过tanh函数来产生新的候选值,然后结合遗忘门确定最终的更新
1.4 细胞状态更新
公式:

遗忘门找到了需要忘掉的信息$ f_t $后,再将它与旧状态相乘,丢弃掉确定需要丢弃的信息。再将结果加上$ i_t \times C_t $使细胞状态获得新的信息,这样就完成了细胞状态的更新。
1.5 输出门
公式:
二、LSTM的维度解析
模型定义代码:
1 | import torch.nn as nn |
对于文本处理而言,一个简单的LSTM模型涉及到嵌入层,LSTM层(其中又包含输入层,隐藏层和输出层),全连接层
嵌入层
word_size通常指的是词汇表中单词数量(大于或等于),定义词向量的行数input_dim输入到LSTM的维度,既定义词向量的列数
当一个句子的分词数量小于
input_dim时,填不满他所需要的维度,此时使用0来填充到(word_size,input_dim)形状LSTM层
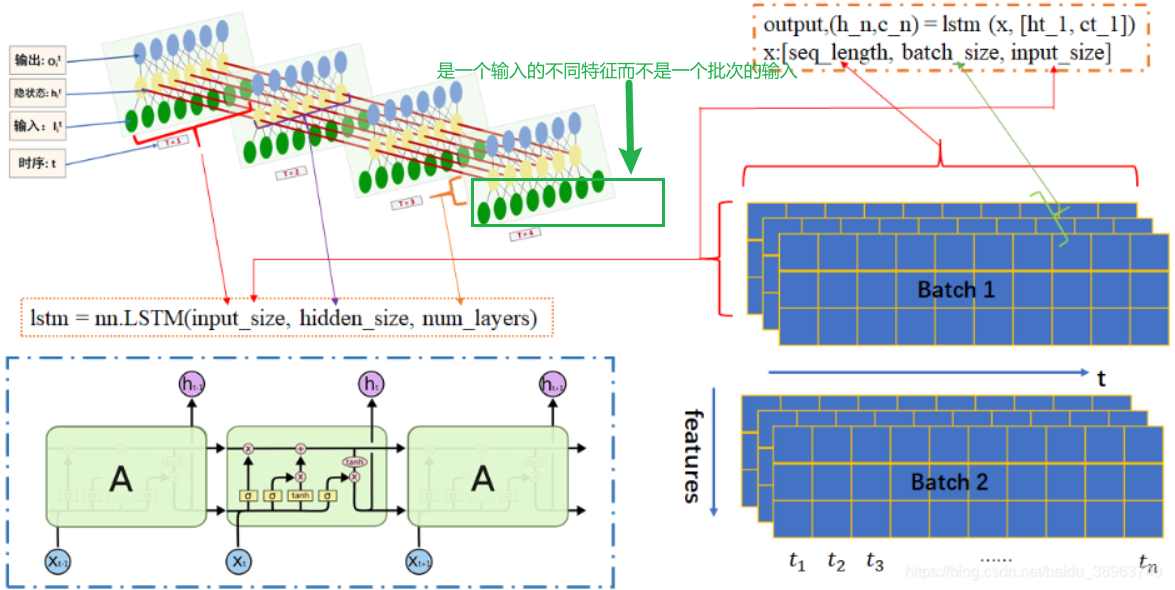
input_dim:输入特征的维度,即每个时间步的输入向量长度。hidden_dim:隐藏状态的维度,即LSTM单元的输出特征向量长度。num_layers:LSTM的层数,即LSTM单元的堆叠层数,不同隐藏层的hidden_size不一定必须相同,但通常在实践中会设置为相同的值。batch_first:输入和输出张量的维度顺序。输出形状batch_first=True:(batch_size, seq_len, hidden_size)(常用)batch_first=False:(seq_len, batch_size, hidden_size)
下面这张图很好地剖解了LSTM的整体和局部结构,但是需要注意的是左下角的每一个“A”结构对应的是左上角的一个层
全连接层
- 输入为lstm层最后一个时间步的隐藏状态,形状为(batch_size,hidden_size),输出为(batch_size,num_class),这个num_class就是我们的标签类别数
